Microsoft ends support for Internet Explorer on June 16, 2022.
We recommend using one of the browsers listed below.
- Microsoft Edge(Latest version)
- Mozilla Firefox(Latest version)
- Google Chrome(Latest version)
- Apple Safari(Latest version)
Please contact your browser provider for download and installation instructions.


November 11, 2025
NTT, Inc.
Establishing High-Precision Position Estimation Technology for Infrastructure Inspection and Digital Ledger Management Using Drive Recorder Images
~Reducing costs in infrastructure inspection DX (Digital Transformation) for utility poles, road signs, and street trees~
News Highlights:
- NTT has developed technology that accurately identifies the positions of infrastructure assets captured in drive recorder images. This enables a significant reduction in on-site inspections traditionally performed by field workers and supports the creation of highly accurate digital ledgers to replace paper-based records.
- The technology uses a 3D scene reconstruction method that generates 3D data from drive recorder images, enabling high-precision localization of all visible objects within each image.
- By applying this technology to manage entire cities in 3D, it becomes possible to utilize the resulting data for urban planning or disaster prevention in coordination with 3D city models promoted by government agencies, as well as for update of high-precision 3D maps required for autonomous driving and drone route planning. This contributes to the realization of safer and smarter cities.
TOKYO - November 11, 2025 - NTT, Inc. (Headquarters: Chiyoda-ku, Tokyo; President and CEO: Akira Shimada, hereinafter "NTT") has developed a technology to identify the positions of infrastructure assets within images captured by in-vehicle cameras such as drive recorders (Figure 1). By applying this technology, it becomes possible to associate highly accurate location information with images of utility poles, road signs, street trees, and other infrastructure collected from drive recorders installed in vehicles driving through urban areas.
This enables more efficient inspection operations and the creation of highly accurate digital ledgers, contributing to reduced operational costs and improved maintenance of social infrastructure.
Part of this research achievement will be exhibited at NTT R&D FORUM 2025 IOWN ∴Quantum Leap1, held from November 19 to 26, 2025.
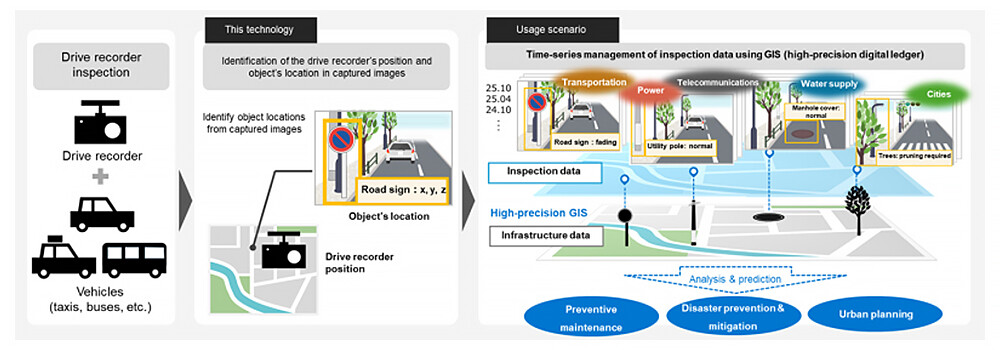 Figure 1 Identification of infrastructure asset positions in drive recorder inspection images and GIS management using this technology
Figure 1 Identification of infrastructure asset positions in drive recorder inspection images and GIS management using this technology
Background
The aging of social infrastructure and the shortage of personnel involved in maintenance and management are serious issues, making a fundamental improvement in the efficiency of maintenance operations an urgent priority. Among these, the digital transformation (DX) of inspection work, which ensures the safety of vast numbers of infrastructure assets, is one of the top priorities.
Recent advances in AI have made it possible to detect and diagnose deterioration from inspection images2, allowing inspections and the creation of digital ledgers using drive recorders without the need for on-site visits. However, the positional information obtained along with drive recorder images, such as GPS data, contains errors of approximately 1 to 10 meters, which can result in inconsistencies in location data for each inspection. To manage inspection images with highly accurate infrastructure location information, it is necessary to develop a technology that can precisely identify the positions of infrastructure assets within the images.
Challenges of Existing Position Estimation Methods
Existing position estimation methods typically involve feature matching between inspection images and reference images (images taken with a known camera position) to estimate the camera's position and then calculate the positions of infrastructure assets within the images.
With this approach, if the inspection image contains distinct landscape features, feature points can be matched to estimate the camera's position and accurately identify the positions of infrastructure assets (Figure 2, top row). However, when inspection images lack distinct landscape features, mismatches can occur, making it impossible to estimate the camera's position and, consequently, to determine the locations of infrastructure assets (Figure 2, bottom row).
To handle a wide variety of inspection images, it is necessary to develop a technology that can accurately identify locations regardless of the presence or absence of distinct landscape features.
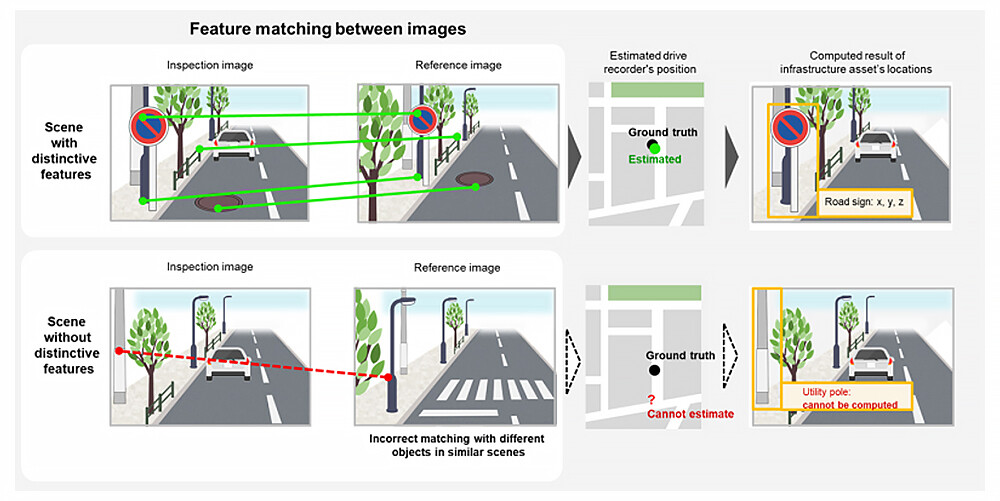 Figure 2 Challenges of existing position estimation methods
Figure 2 Challenges of existing position estimation methods
Research Achievements
Existing position estimation technologies relied solely on the landscape features captured within a single inspection image. In contrast, this technology generates 3D data from a sequence of images, using a broader range of landscape features than those visible in a single inspection image. This approach enables high-precision position estimation even in areas with few distinguishable features.
Specifically, high-precision "reference 3D data" is prepared in advance using 3D reconstruction technology and position information with high accuracy (Figure 3, Step 1). Similarly, "inspection 3D data" is generated from a series of drive recorder images that include the inspection images (Figure 3, Step 2). By registering these two 3D datasets, the high-precision positional information from the reference 3D data is mapped onto the inspection 3D data (Figure 3, Step 3), allowing the drive recorder's position and the locations of infrastructure assets in the inspection images to be accurately identified. This makes it possible to link high-precision infrastructure position information to drive recorder inspection images.
[Key Characteristics of the Technology]
- Characteristics of the reference 3D data
This technology uses reference 3D data for the inspection area, which includes high-precision position information as well as 3D geometry, color, and image features. The reference 3D data is created using 3D reconstruction technology from images and/or point cloud data with high-precision positional information, accumulated by NTT through Mobile Mapping System (MMS) inspections3. - Characteristics of the 3D data registration method
In Step 3, the section of the reference 3D data to be used is narrowed down based on GPS positions recorded during image capture. To accurately register the 3D data within this section, a proprietary algorithm was developed that combines image features and 3D geometry information.
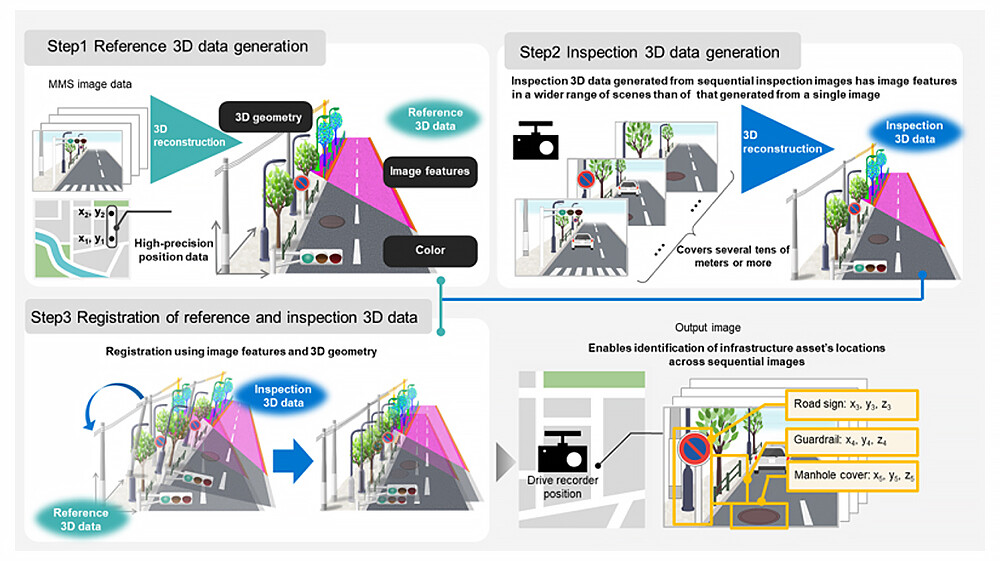 Figure 3 Overview of this technology
Figure 3 Overview of this technology
Overview of Verification
● Experiment Conditions
A verification experiment was conducted using the NCLT public dataset4, assuming road environments with sparse landmarks and few visible objects.
To simulate the positional errors typically obtained during inspections (e.g., GPS), noise was added to the initial position of the inspection 3D data in Step 3 (position noise: 0–10 m, rotation noise: -50° to 50°). The ability of this technology to accurately register the inspection 3D data to the reference 3D data was tested through 100 repeated trials.
● Experimental Results
The results of 100 trials confirmed that the inspection 3D data could be precisely registered to the reference 3D data, with a median location error of 0.11 m and a median rotation error of 1.28°.
This demonstrates that high-precision positional information can be linked to the entire inspection 3D data, enabling accurate identification of the locations of infrastructure assets across all images used to generate the inspection 3D data.
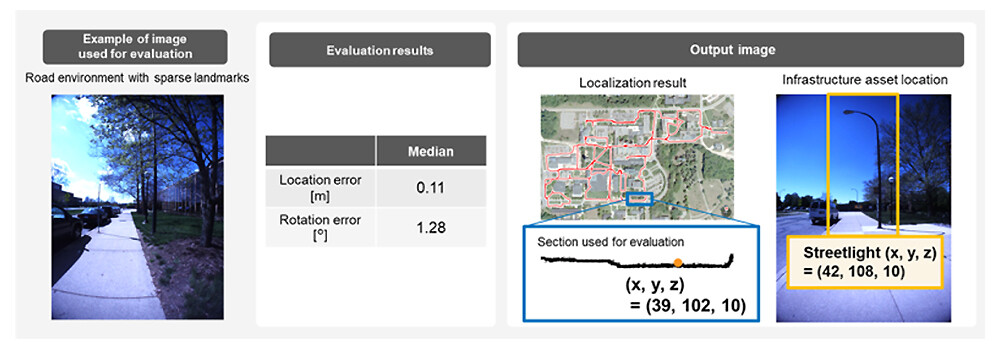 Figure 4 Experimental results and output
Figure 4 Experimental results and output
Future Developments
Going forward, experiments will be conducted in domestic road scenes, aiming for practical application in inspection and digital ledger creation solutions using drive recorders that are being deployed across the NTT Group. This will contribute to reducing operational workloads and costs, which are common challenges in social infrastructure maintenance.
In addition, by applying this technology to manage entire cities in 3D, it will be possible to utilize the data for urban planning or disaster prevention in coordination with 3D city models promoted by government agencies, as well as for update of high-precision 3D maps required for autonomous driving or drone route planning. This will help realize safer, smarter, and more resilient cities.
Related Previous Press Releases
- May 16, 2022: "NTT's Image Recognition AI Accurately Detects Rust in Social Infrastructure Facilities ~ Reducing operational costs through single-run inspection of facilities ~"
- May 13, 2024: "Established a technology to automatically estimate the depth of corrosion on steel materials in infrastructure facilities from images ~ Achieve lower maintenance costs through high-precision diagnosis of equipment durability and load-bearing capacity ~"
[Glossary]
1NTT R&D FORUM 2025 IOWN ∴Quantum Leap official website https://www.rd.ntt/e/forum/2025/![]()

2GIS (Geographic Information System)
A technology that comprehensively manages and processes data with geographic location information, enabling visual representation and analysis.
3Mobile Mapping System (MMS)
A vehicle-mounted measurement system equipped with laser scanners and cameras that acquires high-precision 3D positional information of road surroundings while driving. At NTT, it is used for inspection of infrastructure assets outside company premises, such as utility poles and cables.
4NCLT Public Dataset
A multi-sensor dataset recorded across different seasons and times of day on the University of Michigan North Campus. The camera positions are known at the time of image capture.
[Reference] Nicholas Carlevaris-Bianco, Arash K. Ushani and Ryan M. Eustice, University of Michigan North Campus long-term vision and lidar dataset. International Journal of Robotics Research, 35(9):1023-1035, 2015.
About NTT
NTT contributes to a sustainable society through the power of innovation. We are a leading global technology company providing services to consumers and businesses as a mobile operator, infrastructure, networks, applications, and consulting provider. Our offerings include digital business consulting, managed application services, workplace and cloud solutions, data center and edge computing, all supported by our deep global industry expertise. We are over $90B in revenue and 340,000 employees, with $3B in annual R&D investments. Our operations span across 80+ countries and regions, allowing us to serve clients in over 190 of them. We serve over 75% of Fortune Global 100 companies, thousands of other enterprise and government clients and millions of consumers.
Media contact
NTT, Inc.
NTT Information Network Laboratory Group
Public Relations
Inquiry Form![]()
Information is current as of the date of issue of the individual press release.
Please be advised that information may be outdated after that point.




NTT STORY
WEB media that thinks about the future with NTT