2024年3月26日
NTTコミュニケーションズ株式会社
日本電信電話株式会社
NTTアーバンソリューションズ株式会社
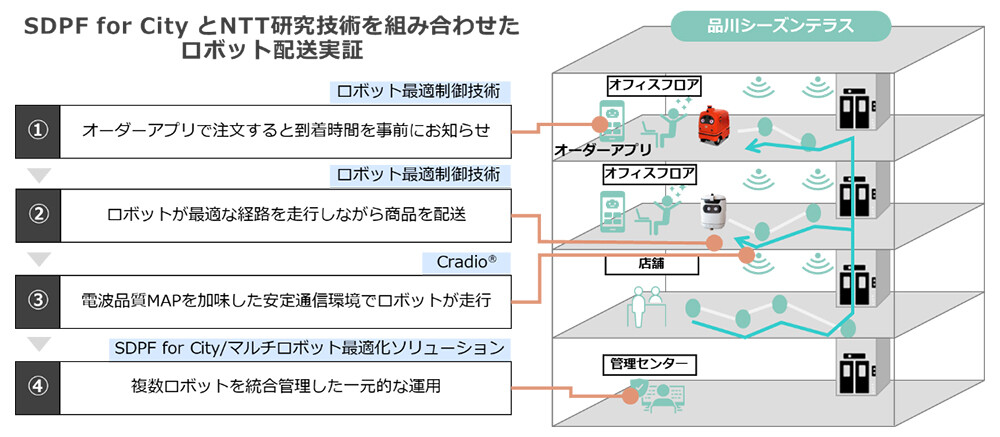
品川シーズンテラスでNTTグループの技術を複数活用したロボット配送実証を実施
~最適な経路生成や電波品質を加味したロボット制御機能を実現~
NTTコミュニケーションズ株式会社(以下NTT Com)、日本電信電話株式会社(以下 NTT)、NTTアーバンソリューションズ株式会社(以下NTT アーバンソリューションズ)の3社は、2024年2月5日~3月15日に、品川シーズンテラスにて、ビル内ロボット配送実験(以下 本実証)を実施しました。NTTグループが保有するロボット最適制御技術やマルチ無線プロアクティブ制御技術の適用により、到着時間の正確性向上、配送時間の短縮、早期異常検知など、より効率的かつ安全なマルチロボット運用を実現しました。

1. 本実証の背景
近年、少子高齢化が進み、減少する労働人口への対応や高齢化社会に対応した街づくりが求められる中、配送や警備、移動手段などとして、ロボットの活用ニーズが一層高まると想定されています。一方で、複数のロボットが同時に走行する際の衝突や、走行中の通信断による稼働停止など、効率的かつ安全にロボットを活用していくためには多くの課題があります。このたびNTT Com、NTTおよびNTTアーバンソリューションズの3社は、これら課題の解決をめざし、本実証を実施しました。
2. 本実証の概要
| 時期 | 2024年2月5日~2024年3月15日 |
|---|---|
| 実証場所 | 「品川シーズンテラス」(東京都港区港南1丁目2番70号) |
| 使用ロボット | 株式会社ZMP「DeliRo®(デリロ®)※1」2台、アスラテック株式会社「RICE※2」2台 |
| 実証内容 | オフィス入居者がオーダーアプリを用いて注文した商品について、ビル内のコンビニ店舗(デイ・ナイト株式会社による運営)からの配達作業を自律走行型サービスロボットが代行し、注文者へ商品を配達します。 |
| 各社の役割 |
|
 <実証概要イメージ>
<実証概要イメージ>
3. 本実証の結果
本実証において下記のような有用性を確認いたしました。
| ① ロボット最適制御技術を用いた効率的なロボット配送 |
|
|---|---|
| ② Cradio®を用いた安全なロボット走行 |
|
| ③ SDPF for City/マルチロボット最適化ソリューションを用いたロボット運用 |
|
① ロボット最適制御技術を用いた効率的なロボット配送
これまで、ビル内の混雑状況を基にした走行経路の設定および所要時間の見積もりの有効性について実証実験※7を通して確認してきました。本実証では、ロボット最適制御技術を用いて異種・複数のロボットが競合を回避しつつビル内の最短経路を選ぶことで、固定的にルート設定する従来手法に比べて配送時間を約30%削減することができました。また走行時間に加え店舗での作業時間も予測することで、注文者に事前提示する到着時間の誤差を、過去実績平均値を用いる場合よりも約15%削減することができました。
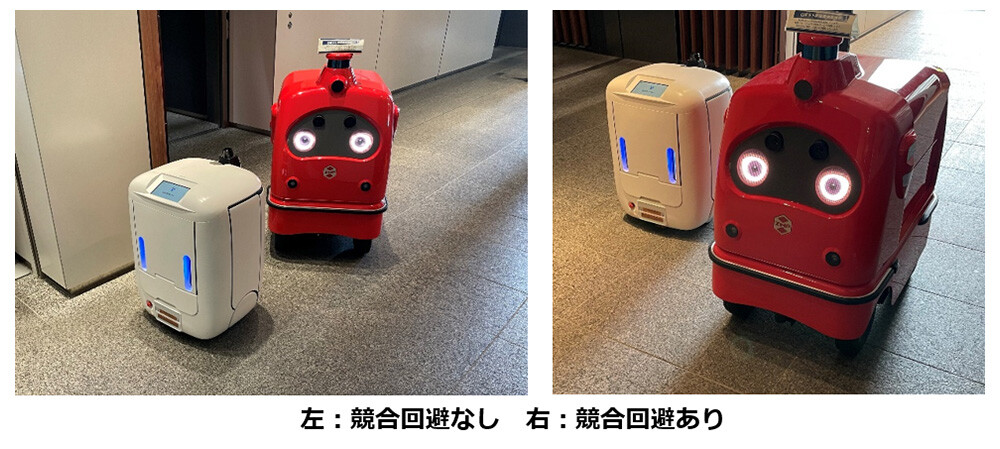 <ロボット競合回避の様子>
<ロボット競合回避の様子>
② Cradio®を用いた安全なロボット走行
Cradio®を用いることで、無線基地局の運用状況と連携するとともに高精細な建物情報や無線装置の特性を考慮した精緻な電波品質MAPの作成が可能となります。今回作成した電波品質MAPと実測値の誤差はRMSEで約5dBであり、ロボットの走行経路選定に十分な精度であることを確認しました。作成した電波品質MAPの情報をロボット最適制御技術と連携させることで、-75dBm以下の弱電界エリアの走行距離を0mにでき、ロボットが制御不可になるリスクを低減できました。また、Cradio®による無線通信品質の予測技術をロボットの走行制御に連携させることで、無線通信品質の劣化前にロボットの速度制御・停止制御を実施し、安全なロボット走行への有用性も確認しました。※8
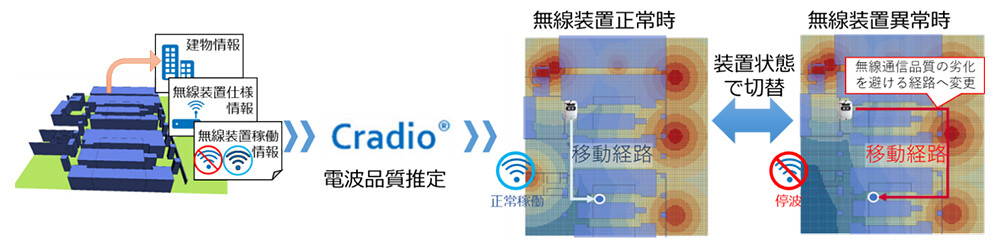 <Cradio®シミュレーション結果>
<Cradio®シミュレーション結果>
③ SDPF for City/マルチロボット最適化ソリューションを用いたロボット運用
これら①②の技術をSDPF for City/マルチロボット最適化ソリューションに適用することで、異なるロボットプラットフォームを統合的に管理し、複数・異種のロボットを一元的に運用することが可能となりました。これにより、複数ロボットの現在地や稼働状況の可視化、遠隔からの管理・操作を一元的な管理画面上で可能となり、より効率的な運用・管理が実現できることを確認しました。
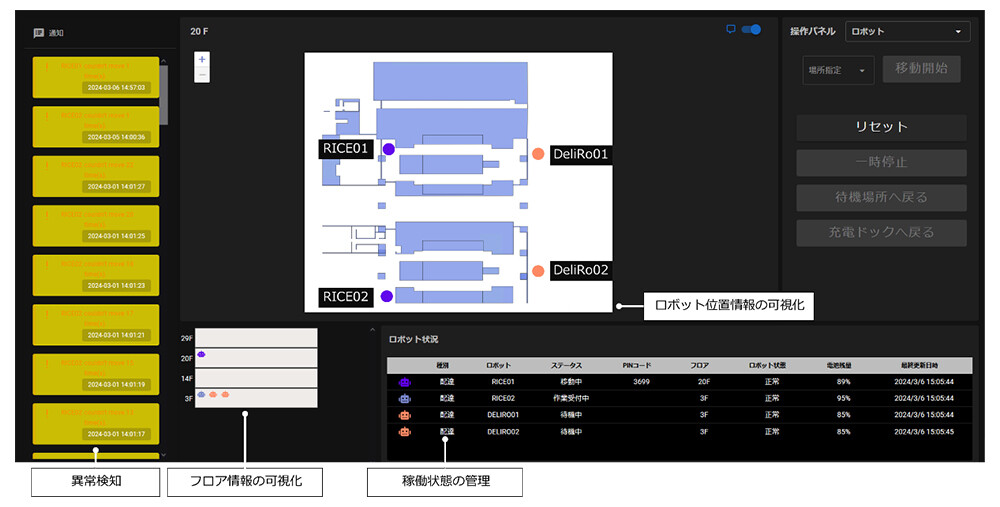 <複数ロボットの管理画面>
<複数ロボットの管理画面>
4. 今後の展開
今後もNTT Com、NTT、NTTアーバンソリューションズの3社は、人とロボットが協働・共生する街の実現をめざし、さらなる取り組みを進めてまいります。
またNTTグループは、引き続き品川港南エリアをはじめとして周辺企業や地域の皆様と連携しながら、ICTを活用した街づくりに取り組んでまいります。
※1:「DeliRo(デリロ)」とはZMPが提供する無人宅配ロボットです。
https://www.zmp.co.jp/products/lrb/deliro![]()
※2:「RICE」とはアスラテックが提供する自律走行型配送ロボットです。
https://www.asratec.co.jp/products/rice/![]()
※3:NTT Comが提供する「SDPF for City」とは、人の流れや施設内外の情報、ロボットなどのモノの情報など都市に点在するさまざまなデータをシームレスに融合できるプラットフォームです。「Smart Data Platform」は、データ利活用に必要な収集・蓄積・管理分析におけるすべての機能を、ICTインフラも含めてワンストップで提供し、データ利活用によるDX実現を加速させるプラットフォームです。
https://www.ntt.com/business/dx/smart/city/![]()
※4:NTTが提供する「街づくりDTC®」とは、IOWN技術を活用した、デジタルツインコンピューティングの考えに基づき、様々なデジタルツイン間の連鎖により街の全体最適化を行う技術です。
https://group.ntt/jp/newsrelease/2021/02/02/210202a.html
※5:NTTが提供する「マルチ無線プロアクティブ制御技術 Cradio®」はIOWNの構成要素の1つとして、研究開発を進める技術です。
https://journal.ntt.co.jp/article/13100![]()
※6:RMSE(Root Mean Squared Error)とは二乗平均平方根誤差のことであり、推定の誤差の大きさを測る指標の1つです。
※7:ビル内の混雑状況などを予測した自律的かつ効率的な「ロボットによるフードデリバリ」の実証実験開始について(2022年10月)
https://group.ntt/jp/newsrelease/2022/10/03/221003a.html
※8:Cradio®による無線通信品質の予測技術に関する実証実験については、別紙のとおりです。
本件に関するお問合せ先
NTTコミュニケーションズ株式会社
ビジネスソリューション本部
スマートワールドビジネス部 スマートシティ推進室
smart-city@ntt.com
日本電信電話株式会社
サービスイノベーション総合研究所
企画部広報担当
nttrd-pr@ml.ntt.com
NTTアーバンソリューションズ株式会社
品川港南2050プロジェクト推進室
sk2050-pr-gm@ntt-us.com
<別紙>Cradio®電波劣化予測技術を活用したロボット制御の実証実験について
1. 実証概要
| 時期 | 2023年12月 |
|---|---|
| 実証場所 | 「CROSS LAB for Smart City※9」(東京都港区芝浦3-4-1グランパークタワー) |
| 使用ロボット | テレプレゼンスロボット「temi※10」 |
| 各社の役割 |
|
| 実証内容 | Cradio®にて継続的な電波品質の劣化が予測された場合、SDPF for Cityにてネットワークが切断される恐れがあると判断し、ロボットに対して、タスクの停止指示や、速度変更、経路の変更指示を行います。 |
2. 実証結果
Cradio®の無線通信品質予測技術とSDPF for City/マルチロボット最適化ソリューションの連携により、ロボットからの映像伝送の品質改善とロボット制御プラットフォームとの通信断の防止を実現しました。
通常では、無線通信品質の劣化によりロボットと制御プラットフォーム間で通信断が発生するため、ロボットの運用に支障が生じます。一方、Cradio®と連携した場合、通信断が発生する前に予め無線通信品質の劣化を予測することにより、制御プラットフォームがロボットを制御可能な状態での事前対処(動作停止、経路変更等)が可能になります。
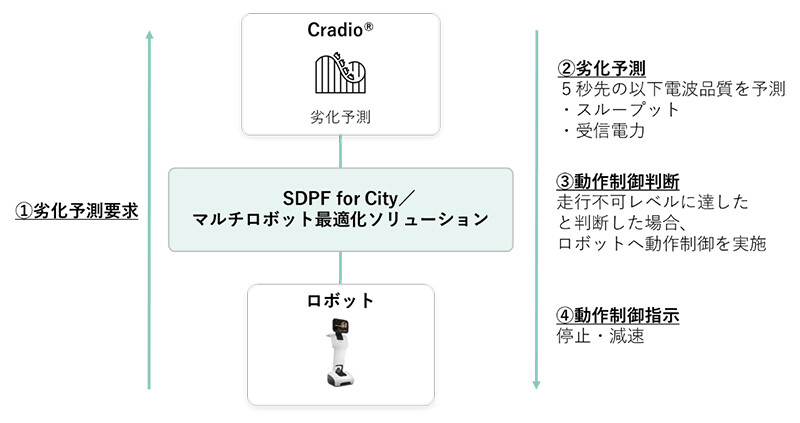 <システム構成イメージ>
<システム構成イメージ>
本実証によりCradio®による無線通信品質予測技術を用いて、リアルタイムかつ低遅延なロボット動作制御の実現が可能であることを確認しました。
今後も両社はロボットの走行時における安全課題の解決や、走行可能フィールドのさらなる拡大をめざしていきます。
※9:「CROSS LAB for Smart City」はSmart Cityにおけるさまざまなパートナーの皆さまと、知見や技術を持ち寄り、オープンかつアジャイルな開発ができる共創の場として、NTT Comが2021年4月に開設しました。グリーンフィールド型Smart Cityなど、実際のフィールドでの実証実験が困難な場合や、センサーなどを用いた技術検証を行うことができ、Smart City分野でのサービス/ソリューションの価値創造の加速に寄与する施設です。
https://www.ntt.com/business/dx/smart/city/cross-lab.html![]()
※10:temi国内総代理店:株式会社hapi-robo st(本社:東京都世田谷区/社長:富田直美)
オフィシャルサイト https://www.robotemi.jp/![]()
ニュースリリースに記載している情報は、発表日時点のものです。
現時点では、発表日時点での情報と異なる場合がありますので、あらかじめご了承いただくとともに、ご注意をお願いいたします。




NTT STORY
NTTとともに未来を考えるWEBメディアです。